3D Metrology Systems, Capability Overview, Custom Engineered Motion Systems, Data Storage, Electronics, Gantries, Gimbals & Optical Mounts, Hexapods, Integrated Automation Systems, Laser Scan Heads, Laser Systems, Medical Device Manufacturing, Motion Control Platforms, Motors, Optics & Photonics, Piezoelectric Nanopositioners, Precision Manufacturing, Process-Specific Products, Science & Research Institutions, Semiconductor, Stages & Actuators, Test & Inspection
Capability Overview
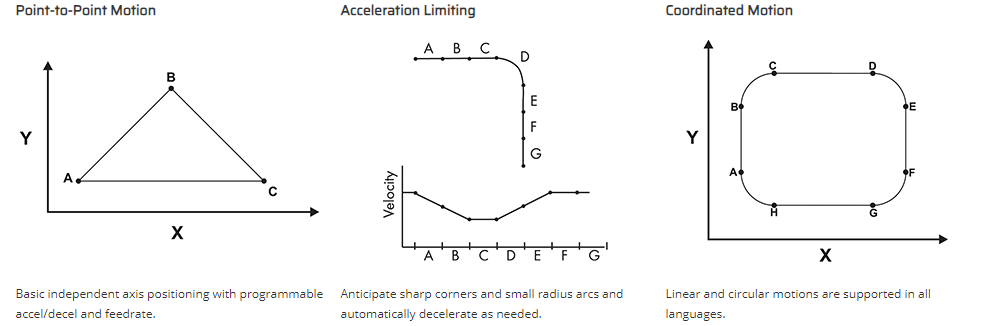
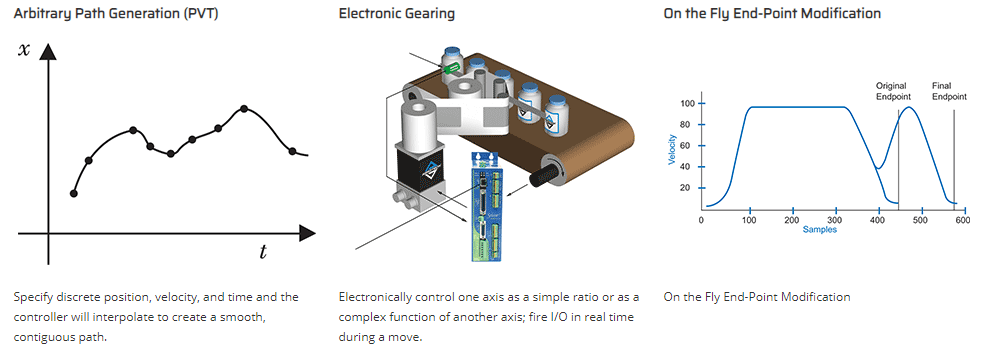
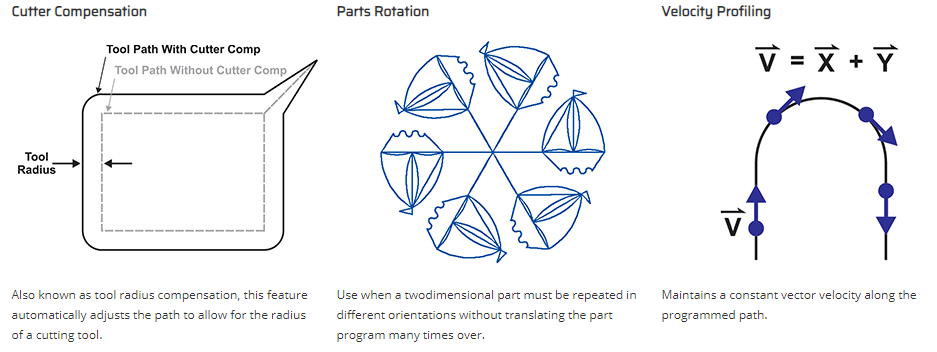
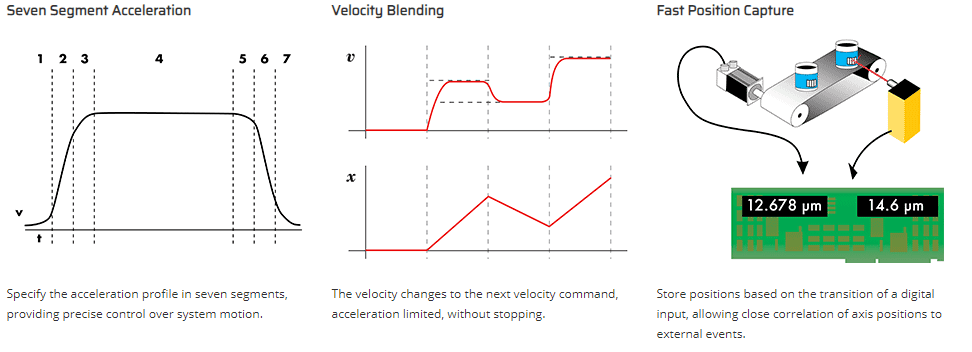
Standard Controller Capabilities