3D Metrology Systems, Capability Overview, Custom Engineered Motion Systems, Data Storage, Electronics, Gantries, Gimbals & Optical Mounts, Hexapods, Integrated Automation Systems, Laser Scan Heads, Laser Systems, Medical Device Manufacturing, Motion Control Platforms, Motors, Optics & Photonics, Piezoelectric Nanopositioners, Precision Manufacturing, Process-Specific Products, Science & Research Institutions, Semiconductor, Stages & Actuators, Test & Inspection
Capability Overview
Coordinated Control
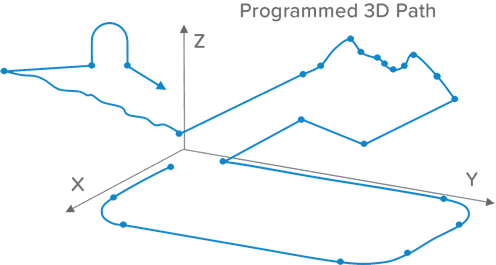
Aerotech’s control technologies can coordinate and synchronize up to 32 axes of motion of any motion technology to sub-microsecond servo-loop synchronization and sub-millisecond path trajectories. This tight synchronization between all motion axes results in higher precision processing and faster process throughput.
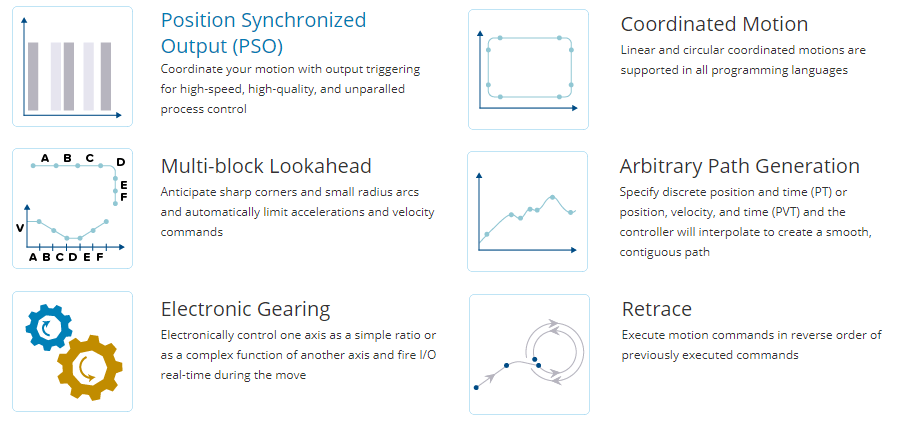
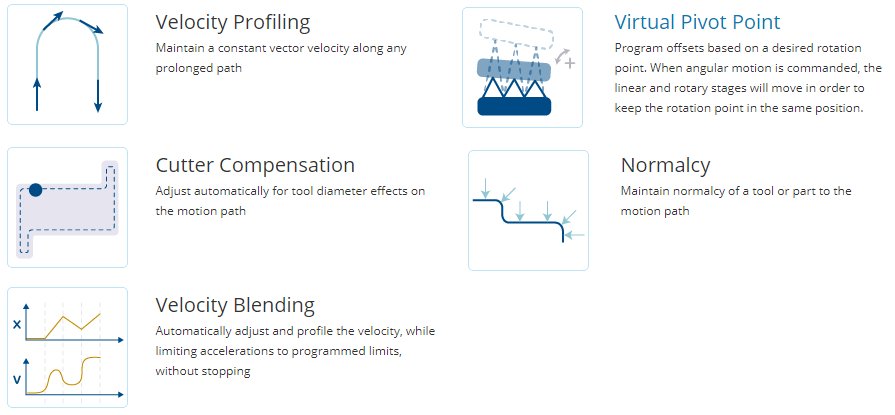
Examples of Aerotech controller features that enable coordination and synchronization are: