Automation1 iSMC Intelligent, Software-Based Motion Controller
Our Automation1 Software-Based Machine Controller (iSMC) tightly integrates precision motion with process control. Whether you’re programming a simple move, building a complete machine or doing something in between, the Automation1 iSMC delivers high-quality automation and improved throughput.
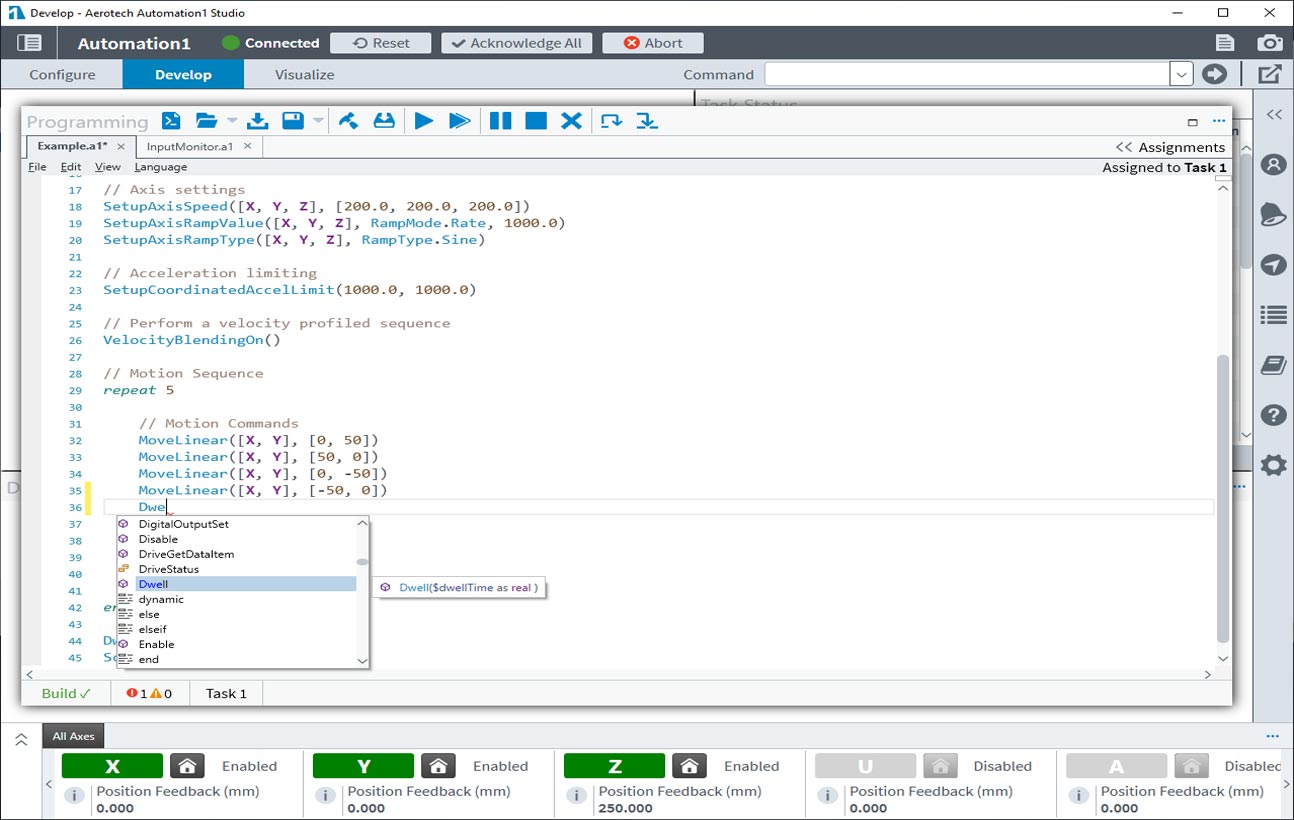
Because the iSMC integrates with our user-friendly Automation1 Motion Development Kit, you’ll quickly configure and develop your application, easily set up control devices and enjoy programming with features like intelligent autocomplete, context sensitive help, EasyTune®, live build checking, a variable and I/O watch window, and more.
Capable of running a PC-based or drive-based hardware platform, the iSMC allows you flexibility in deploying a wide variety of motion control solutions.
Have Questions? Contact an Aerotech Expert.

Automation1 Advantages
Extreme Performance
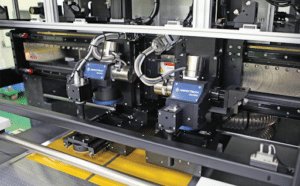
The Automation1 controller will take you to the next level in motion control performance. High-end machine and system builders are building better solutions with Automation1. See how Automation1 improves laser scan system performance.
Easy to Use
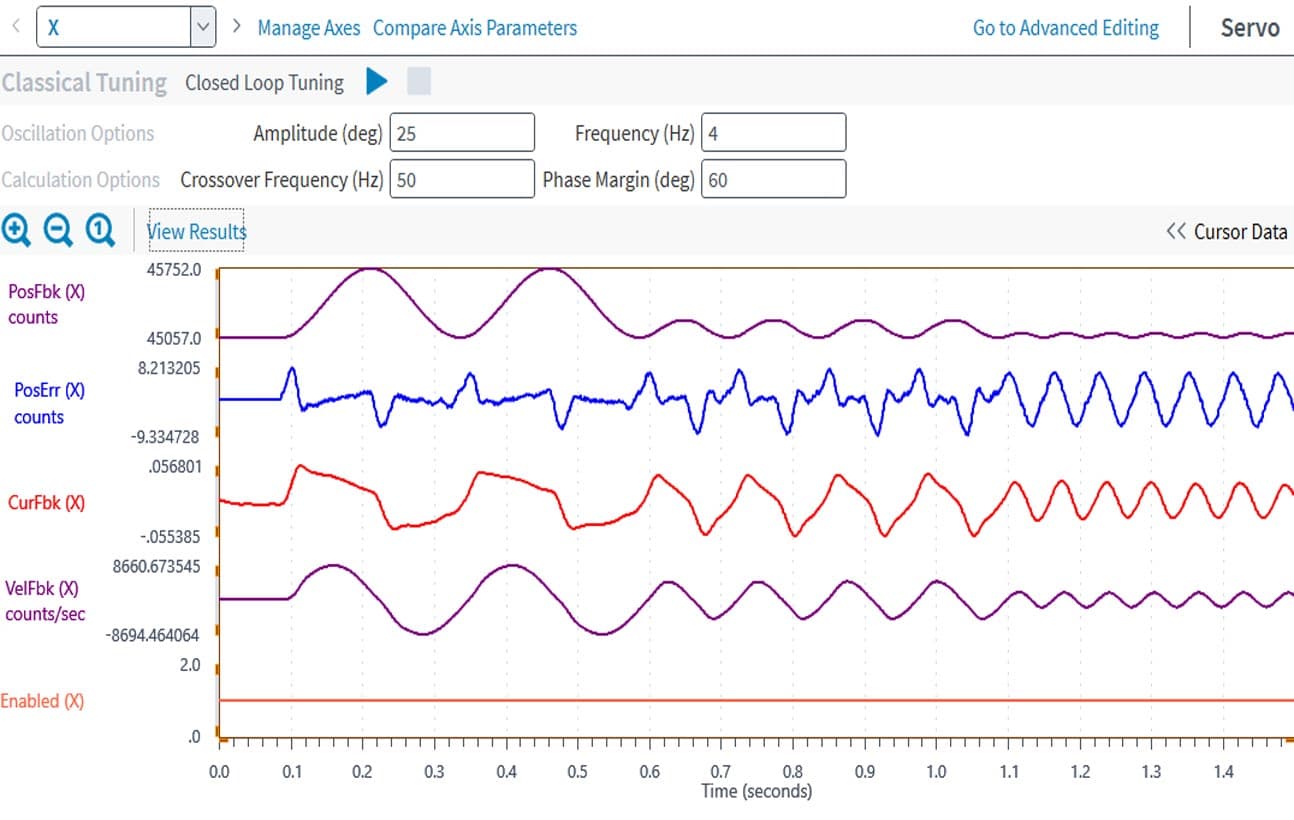
Automation1 is easy to learn and to use. Quick setup tools such as Machine Setup, Checklists and EasyTune allow even a novice to configure precision motion control. Several graphical helper modules exist in the Studio application for motor phasing, homing, motor tuning and more.
Tons of Functionality
The Automation1 iSMC has tons of canned functionality. Advanced features such as PSO and IFOV as well as a variety of standard controller capabilities are all configured or programmed via the iSMC controller.

Connectivity & Control
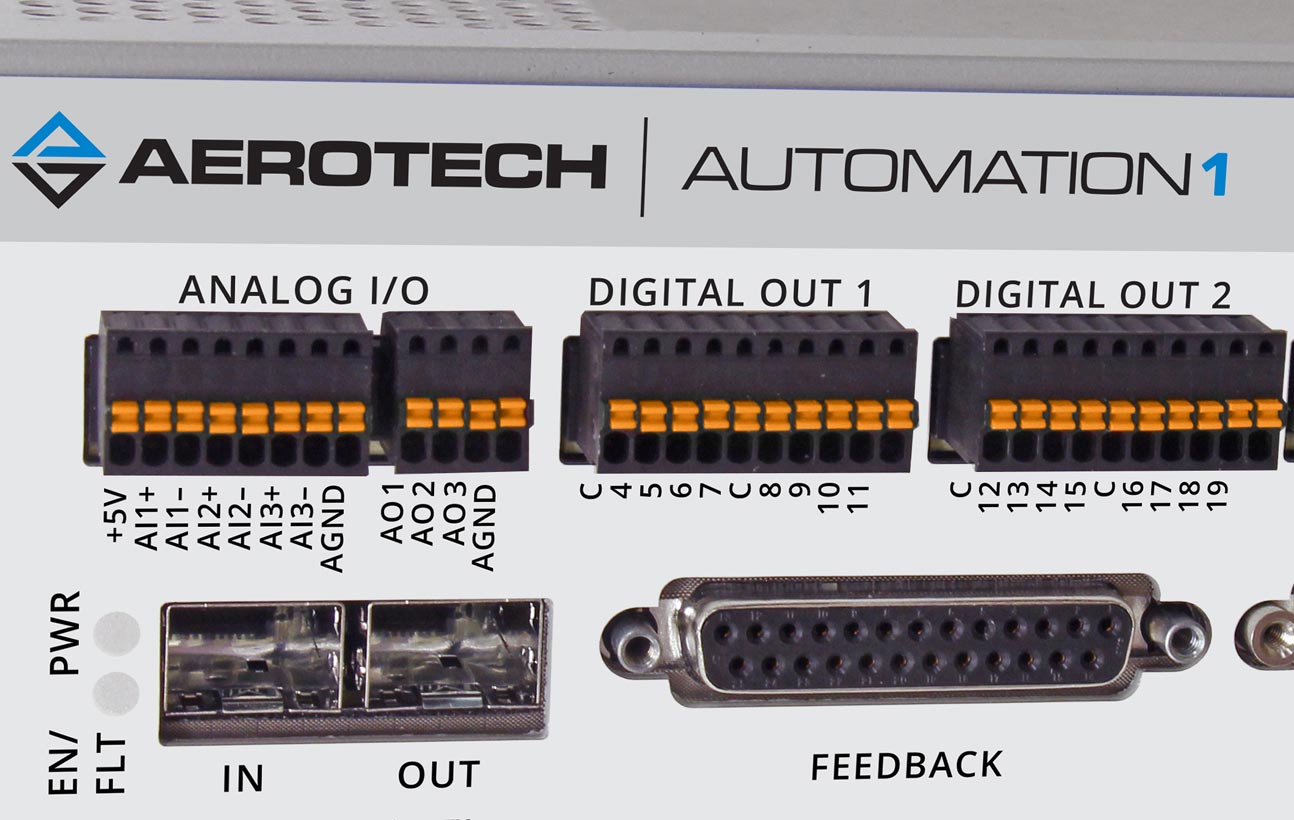
Connect sensors, cameras, lasers and other tools via Automation1 drive-based I/O or industrial Ethernet buses such as MODBUS, EtherNet/IP™, and EtherCAT – all managed by the controller hardware. The AeroScript programming language and controller APIs enable high-level control algorithms to be programmed around these devices.

Flexible Deployment
Deploy your controller solution to an industrial PC or to one of the Automation1 drive-based controllers. See the selection guide to evaluate the differences.
Command up to 32 axes of servo/stepper and laser scan head motion over the HyperWire® fiber-optic communication bus to Automation1 drive hardware.

Choose from seven homing functions for each axis: speed, distance and distance hold jogging controls; axis in position verification and axis stability verification; incremental motion; geared motion; camming motion and freerun motion commands.
Use Position Synchronized Output to control industrial lasers, cameras and more with less latency. Set analog outputs based on motion conditions like vector velocity. Complete on-the-fly end point modification, high-speed registration, constant force generation, spindle control and more.



Access data quickly through the Studio application and libraries. More than 100 axis status items, 50 task status items and 25 system-level status items are available to collect, and each can be displayed using the data visualizer, written to a file and exported to a Windows file.